数字时钟设计
Published on: January 10, 2024

1.设计内容
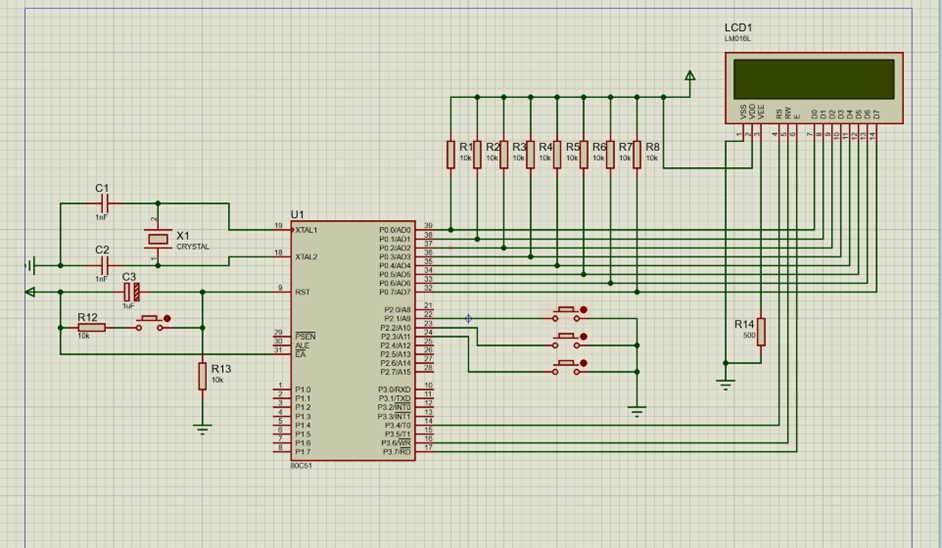
(1)选择51单片机,晶振采用12MHz。
(2)系统可以按“秒”进行计时。
(3)数字时钟可以显示小时(00~23)、分钟(00~59)和秒(00~59)。
(4)可通过按键K1来选择设置“小时”、“分钟”和“秒”。设置时可通过“加”和“减”按键(K2、K3)来调整时间;设置过程中时钟停止计时。
(5)无键按下3秒钟后,自动进入时钟的计时和显示。
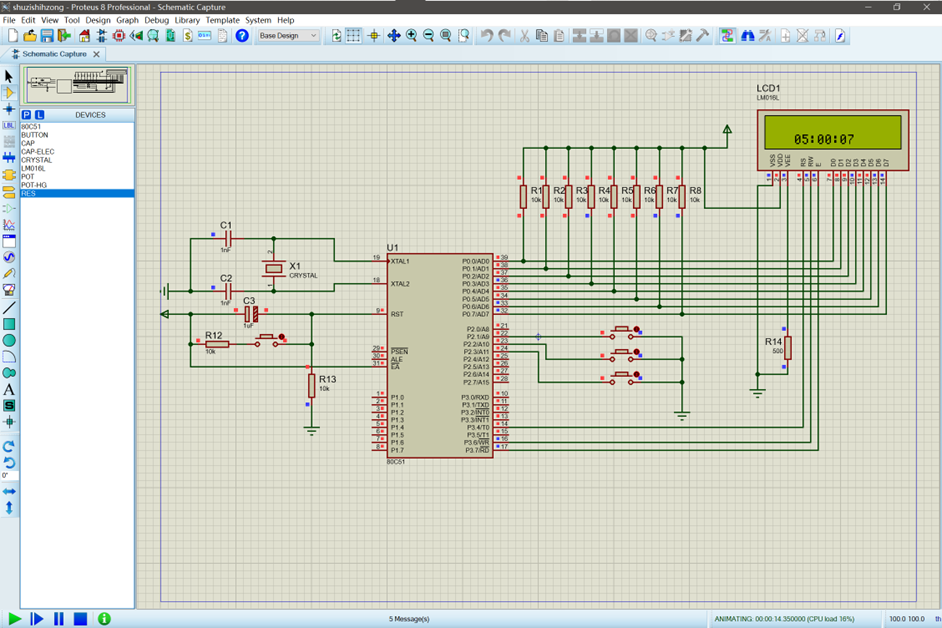
proteus 仿真图如下:
 程序源代码:
程序源代码:
#include <reg52.h>
#include <string.h>
#define uchar unsigned char
#define uint unsigned int
sbit en = P3^7;
sbit rs = P3^4;
sbit rw = P3^6;
sbit k1 = P2^1;
sbit k2 = P2^2;
sbit k3 = P2^3;
sbit k0 = P2^0;
uchar key;
uchar t;
uchar time[] = {"00:00:00"};
char hour,minute,second;
void delay(uint x )
{
uint i,j;
for(i=0;i<x;i++)
for(j=0;j<120;j++);
}
void write_cmd(uchar cmd)
{
rs=0;
P0=cmd;
delay(5);
en=1;
delay(5);
en=0;
}
void write_data(uchar dat)
{
rs=1;
P0=dat;
delay(5);
en=1;
delay(5);
en=0;
}
void init() {
uint i;
TMOD=0x01;
TH0=0x4c;
TL0=0x01;
EA=1;
ET0=1;
TR0=1;
rw=0;
en=0;
P2=0xff;
hour=0;
minute=0;
second=0;
write_cmd(0x38);
write_cmd(0x0c);
write_cmd(0x06);
write_cmd(0x01);
write_cmd(0x80+0x40+3);
for(i=0;i<8;i++)
{
write_data(time[i]);
}
}
void write_time(uchar addr,uchar dat)
{ uchar shi,ge;
shi=dat/10;
ge=dat%10;
write_cmd(0x80+0x40+addr);
write_data(0x30+shi);
write_data(0x30+ge);
}
void keyscan()
{ if(k1==0)
{
delay(100);
if(k1==0)
{
TR0=0; key++; while(k1==1);
if(key==1)
{
write_cmd(0x80+0x40+10);
write_cmd(0x0f);
delay(1);
}
if(key==2)
{
write_cmd(0x80+0x40+7);
write_cmd(0x0f);
delay(1);
}
if(key==3)
{
write_cmd(0x80+0x40+4);
write_cmd(0x0f);
delay(1);
}
if(key==4)
{
key=0;
delay(1);
}
}
}
if(key!=0)
{
if(k0==0)
{
delay(5);
if(k0==0)
{
key=0;
TR0=1;
write_cmd(0x0c);
delay(100);
}
}
}
if(key!=0)
{
if(k2==0)
{
delay(5);
if(k2==0)
{
if(key==1)
{
second++;
if(second==60)
{
second=0;
}
write_time(9,second);
write_cmd(0x80+0x40+10);
}
if(key==2)
minute++;
if(minute==60)
{
minute=0;
}
write_time(6,minute);
write_cmd(0x80+0x40+7);
}
if(key==3)
{
hour++;
if(hour==24)
{
hour=0;
}
write_time(3,hour);
write_cmd(0x80+0x40+4);
}
while(k2==0);
}
}
if(key!=0)
{
if(k3==0)
{
delay(5);
if(k3==0)
{
if(key==1)
{
second--;
if(second==-1)
{
second=59;
}
write_time(9,second);
write_cmd(0x80+0x40+10);
}
if(key==2)
{
minute--;
if(minute==-1)
{
minute=59;
}
write_time(6,minute);
write_cmd(0x80+0x40+7);
}
if(key==3)
{
hour--;
if(hour==-1)
{
hour=23;
}
write_time(3,hour);
write_cmd(0x80+0x40+4);
}
while(k3==0);
}
}
}
}
void main()
{
init();
while(1)
{ keyscan();
if(t==20)
{
t=0;
second++;
if(second==60)
{
second=0; minute++;
if(minute==60)
{
minute=0;
hour++;
if(hour==24)
{
hour=0;
}
write_time(3,hour);
}
write_time(6,minute);
}
write_time(9,second);
}
}
}
void timer() interrupt 1
{
TH0=0x4c;
TL0=0x01;
t++; }
基于STM32微控制器的频率计设计
Published on: January 15, 2024
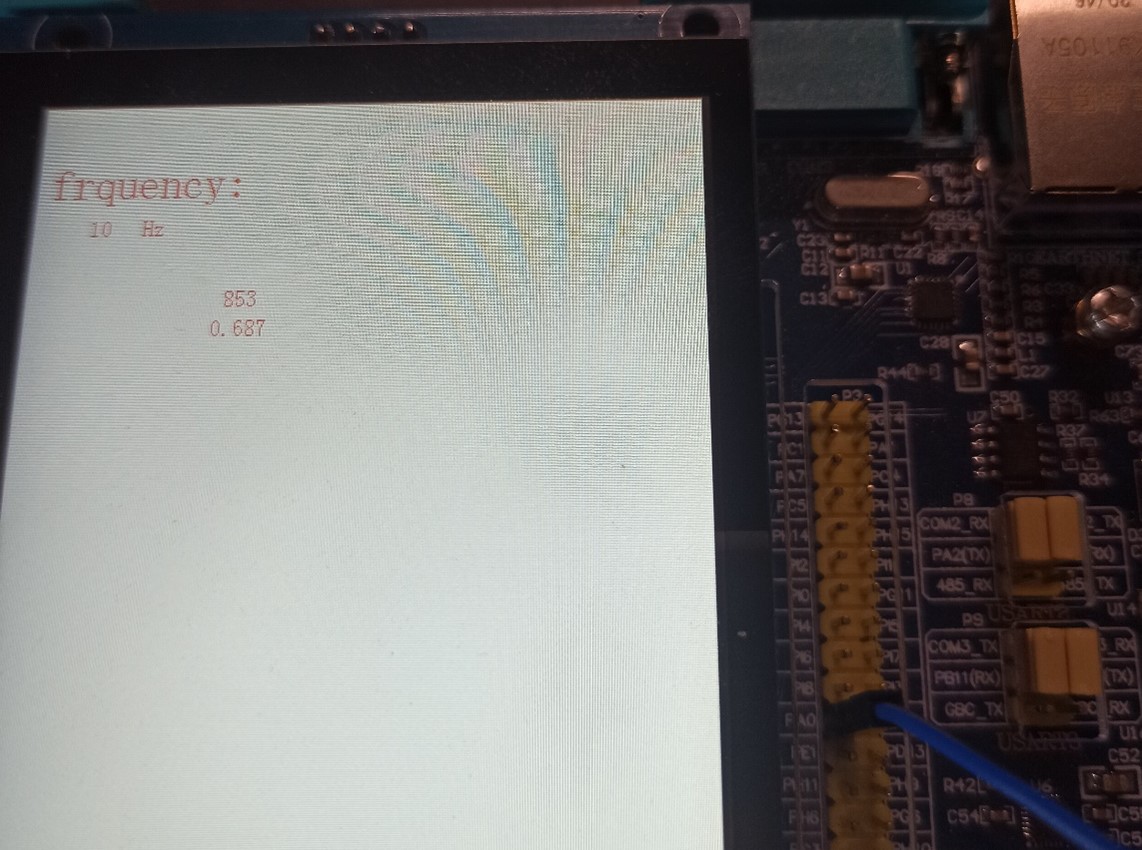
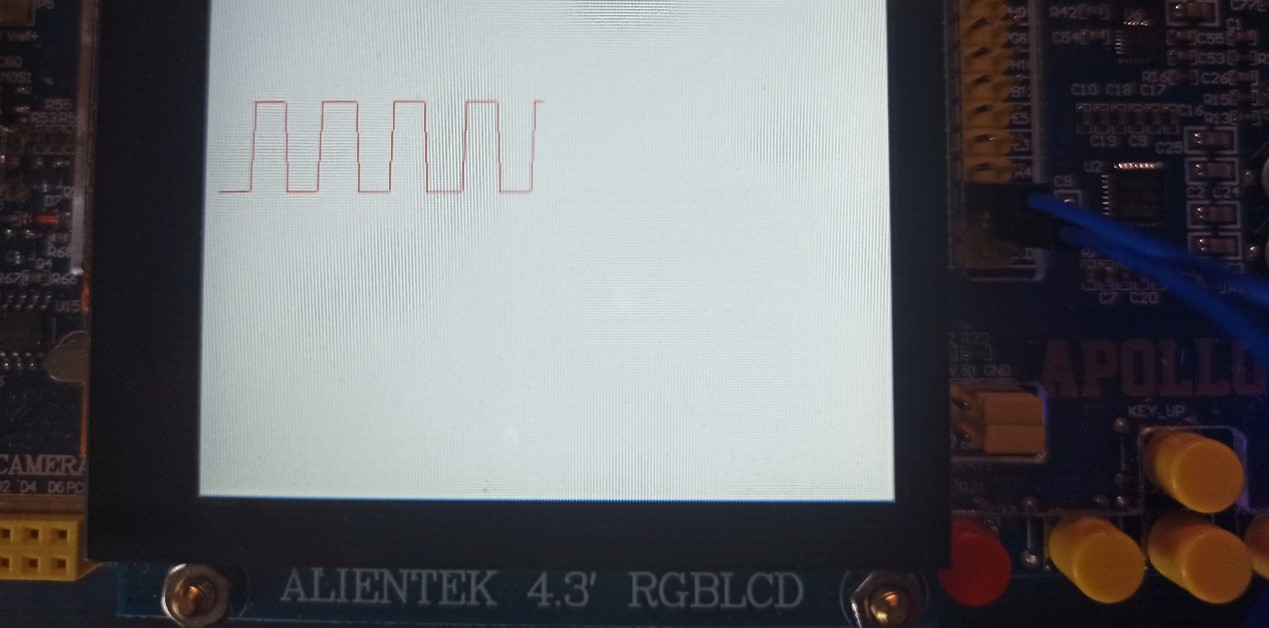
设计任务:利用STM32微控制器设计一数字频率计,采用LCD显示波形、频率。测量信号频率范围为1Hz-10KHz。
 程序源码
main.c
程序源码
main.c
#include "sys.h"
#include "delay.h"
#include "usart.h"
#include "led.h"
#include "exti.h"
#include "sys.h"
#include "delay.h"
#include "usart.h"
#include "lcd.h"
#include "sdram.h"
#include "key.h"
#include "timer.h"
#include "adc.h"
u32 pwm_value;
int main(void)
{
u16 adcx;
float temp;
HAL_Init(); //初始化HAL库
Stm32_Clock_Init(360,25,2,8); //设置时钟,180Mhz
delay_init(180); //初始化延时函数
uart_init(115200); //初始化USART
LED_Init(); //初始化LED
EXTI_Init(); //外部中断初始化
KEY_Init(); //初始化按键
SDRAM_Init(); //SDRAM初始化
LCD_Init(); //LCD初始化
POINT_COLOR=RED;
TIM3_PWM_Init(1000-1,9000-1);//90M/90=1M的计数频率,自动重装载为500,那么PWM频率为1M/500=2kHZ
MY_ADC_Init();
int o;
int buf[120];
for (o=0;o<360;o++) { buf[o]=0; } POINT_COLOR=RED; LCD_ShowString(10,40,260,32,32,"frquency:");
LCD_ShowString(80,80,260,32,16,"Hz"); int i; while(1) { for (i=0;i<120;i++) { buf[i]=adcx; pwm_value=0;
HAL_Delay(100); printf(" %d Hz \r\n ",pwm_value);
POINT_COLOR=RED;
LCD_ShowString(10,40,260,32,32," frquency:"); LCD_ShowxNum(10,80,pwm_value*10,6,16,0);
LCD_ShowString(80,80,260,32,16,"Hz"); adcx=Get_Adc_Average(ADC_CHANNEL_5,20);//获取通道5的转换值,20次取平均
LCD_ShowxNum(134,130,adcx,4,16,0); //显示ADCC采样后的原始值 temp=(float)adcx*(3.3/4096); //获取计算后的带小数的实际电压值,比如3.1111
adcx=temp; //赋值整数部分给adcx变量,因为adcx为u16整形 LCD_ShowxNum(134,150,adcx,1,16,0); //显示电压值的整数部分,3.1111的话,这里就是显示3 temp-=adcx;
//把已经显示的整数部分去掉,留下小数部分,比如3.1111-3=0.1111 temp*=1000; //小数部分乘以1000,例如:0.1111就转换为111.1,相当于保留三位小数。
LCD_ShowxNum(150,150,temp,3,16,0X80); //显示小数部分(前面转换为了整形显示),这里显示的就是111. LCD_ShowString(142,150,200,16,16,".");
if(i!=0) {LCD_DrawLine(10+3*i,600-20*buf[i],10+3*(i-1),600-20*buf[i-1]);} } if (i==120) i=0;LCD_Clear(WHITE); } }
exit.c: #include "exti.h" #include "delay.h" #include "led.h" #include "key.h" void EXTI_Init(void) {
GPIO_InitTypeDef GPIO_Initure; __HAL_RCC_GPIOA_CLK_ENABLE(); //开启GPIOA时钟 __HAL_RCC_GPIOC_CLK_ENABLE(); //开启GPIOC时钟
__HAL_RCC_GPIOH_CLK_ENABLE(); //开启GPIOH时钟 GPIO_Initure.Pin=GPIO_PIN_0; //PA0 GPIO_Initure.Mode=GPIO_MODE_IT_RISING;
//上升沿触发 GPIO_Initure.Pull=GPIO_PULLDOWN; HAL_GPIO_Init(GPIOA,&GPIO_Initure); GPIO_Initure.Pin=GPIO_PIN_13; //PC13
GPIO_Initure.Mode=GPIO_MODE_IT_FALLING; //下降沿触发 GPIO_Initure.Pull=GPIO_PULLUP; HAL_GPIO_Init(GPIOC,&GPIO_Initure);
GPIO_Initure.Pin=GPIO_PIN_2|GPIO_PIN_3; //PH2,3 HAL_GPIO_Init(GPIOH,&GPIO_Initure); //中断线0-PA0
HAL_NVIC_SetPriority(EXTI0_IRQn,2,0); //抢占优先级为2,子优先级为0 HAL_NVIC_EnableIRQ(EXTI0_IRQn); //使能中断线0 //中断线2-PH2
HAL_NVIC_SetPriority(EXTI2_IRQn,2,1); //抢占优先级为2,子优先级为1 HAL_NVIC_EnableIRQ(EXTI2_IRQn); //使能中断线2 //中断线3-PH3
HAL_NVIC_SetPriority(EXTI3_IRQn,2,2); //抢占优先级为2,子优先级为2 HAL_NVIC_EnableIRQ(EXTI3_IRQn); //使能中断线2 //中断线13-PC13
HAL_NVIC_SetPriority(EXTI15_10_IRQn,2,3); //抢占优先级为2,子优先级为3 HAL_NVIC_EnableIRQ(EXTI15_10_IRQn); //使能中断线13 } //中断服务函数
void EXTI0_IRQHandler(void) { HAL_GPIO_EXTI_IRQHandler(GPIO_PIN_0);//调用中断处理公用函数 } void EXTI2_IRQHandler(void) {
HAL_GPIO_EXTI_IRQHandler(GPIO_PIN_2);//调用中断处理公用函数 } void EXTI3_IRQHandler(void) {
HAL_GPIO_EXTI_IRQHandler(GPIO_PIN_3);//调用中断处理公用函数 } void EXTI15_10_IRQHandler(void) {
HAL_GPIO_EXTI_IRQHandler(GPIO_PIN_13);//调用中断处理公用函数 } //中断服务程序中需要做的事情 //在HAL库中所有的外部中断服务函数都会调用此函数 //GPIO_Pin:中断引脚号
extern int pwm_value; void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin) { switch(GPIO_Pin) { case GPIO_PIN_0:
if(WK_UP==1) { pwm_value++; } break; } } key.c: #include "key.h" #include "delay.h" //按键初始化函数 void KEY_Init(void) {
GPIO_InitTypeDef GPIO_Initure; __HAL_RCC_GPIOA_CLK_ENABLE(); //开启GPIOA时钟 __HAL_RCC_GPIOC_CLK_ENABLE(); //开启GPIOC时钟
__HAL_RCC_GPIOH_CLK_ENABLE(); //开启GPIOH时钟 GPIO_Initure.Pin=GPIO_PIN_0; //PA0 GPIO_Initure.Mode=GPIO_MODE_INPUT; //输入
GPIO_Initure.Pull=GPIO_PULLDOWN; //下拉 GPIO_Initure.Speed=GPIO_SPEED_HIGH; //高速 HAL_GPIO_Init(GPIOA,&GPIO_Initure);
GPIO_Initure.Pin=GPIO_PIN_13; //PC13 GPIO_Initure.Mode=GPIO_MODE_INPUT; //输入 GPIO_Initure.Pull=GPIO_PULLUP; //上拉
GPIO_Initure.Speed=GPIO_SPEED_HIGH; //高速 HAL_GPIO_Init(GPIOC,&GPIO_Initure); GPIO_Initure.Pin=GPIO_PIN_2|GPIO_PIN_3;
//PH2,3 HAL_GPIO_Init(GPIOH,&GPIO_Initure); } //按键处理函数 //返回按键值 //mode:0,不支持连续按;1,支持连续按; //0,没有任何按键按下 //1,WKUP按下
WK_UP //注意此函数有响应优先级,KEY0>KEY1>KEY2>WK_UP!!
u8 KEY_Scan(u8 mode)
{
static u8 key_up=1; //按键松开标志
if(mode==1)key_up=1; //支持连按
if(key_up&&(KEY0==0||KEY1==0||KEY2==0||WK_UP==1))
{
delay_ms(10);
key_up=0;
if(KEY0==0) return KEY0_PRES;
else if(KEY1==0) return KEY1_PRES;
else if(KEY2==0) return KEY2_PRES;
else if(WK_UP==1) return WKUP_PRES;
}else if(KEY0==1&&KEY1==1&&KEY2==1&&WK_UP==0)key_up=1;
return 0; //无按键按下
}
timer.c
#include "timer.h"
#include "led.h"
TIM_HandleTypeDef TIM3_Handler; //定时器3PWM句柄
TIM_OC_InitTypeDef TIM3_CH4Handler; //定时器3通道4句柄
/***************************************************************************
****************************************************************************
下面是PWM输出实验相关函数源码
****************************************************************************
****************************************************************************/
//TIM3 PWM部分初始化
//PWM输出初始化
//arr:自动重装值
//psc:时钟预分频数
void TIM3_PWM_Init(u16 arr,u16 psc)
{
TIM3_Handler.Instance=TIM3; //定时器3
TIM3_Handler.Init.Prescaler=psc; //定时器分频
TIM3_Handler.Init.CounterMode=TIM_COUNTERMODE_UP;//向上计数模式
TIM3_Handler.Init.Period=arr; //自动重装载值
TIM3_Handler.Init.ClockDivision=TIM_CLOCKDIVISION_DIV1;
HAL_TIM_PWM_Init(&TIM3_Handler); //初始化PWM
TIM3_CH4Handler.OCMode=TIM_OCMODE_PWM1; //模式选择PWM1
TIM3_CH4Handler.Pulse=arr/2; //设置比较值,此值用来确定占空比,
//默认比较值为自动重装载值的一半,即占空比为50%
TIM3_CH4Handler.OCPolarity=TIM_OCPOLARITY_LOW; //输出比较极性为低
HAL_TIM_PWM_ConfigChannel(&TIM3_Handler,&TIM3_CH4Handler,TIM_CHANNEL_4);//配置TIM3通道4
HAL_TIM_PWM_Start(&TIM3_Handler,TIM_CHANNEL_4);//开启PWM通道4
}
//定时器底层驱动,时钟使能,引脚配置
//此函数会被HAL_TIM_PWM_Init()调用
//htim:定时器句柄
void HAL_TIM_PWM_MspInit(TIM_HandleTypeDef *htim)
{
GPIO_InitTypeDef GPIO_Initure;
__HAL_RCC_TIM3_CLK_ENABLE(); //使能定时器3
__HAL_RCC_GPIOB_CLK_ENABLE(); //开启GPIOB时钟
GPIO_Initure.Pin=GPIO_PIN_1; //PB1
GPIO_Initure.Mode=GPIO_MODE_AF_PP; //复用推完输出
GPIO_Initure.Pull=GPIO_PULLUP; //上拉
GPIO_Initure.Speed=GPIO_SPEED_HIGH; //高速
GPIO_Initure.Alternate= GPIO_AF2_TIM3; //PB1复用为TIM3_CH4
HAL_GPIO_Init(GPIOB,&GPIO_Initure);
}
//设置TIM通道4的占空比
//compare:比较值
void TIM_SetTIM3Compare4(u32 compare)
{
TIM3->CCR4=compare;
}
//获取TIM捕获/比较寄存器值
u32 TIM_GetTIM3Capture4(void)
{
return HAL_TIM_ReadCapturedValue(&TIM3_Handler,TIM_CHANNEL_4);
}
adc.c:
#include "adc.h"
#include "delay.h"
ADC_HandleTypeDef ADC1_Handler;//ADC句柄
//初始化ADC
//ch: ADC_channels
//通道值 0~16取值范围为:ADC_CHANNEL_0~ADC_CHANNEL_16
void MY_ADC_Init(void)
{
ADC1_Handler.Instance=ADC1;
ADC1_Handler.Init.ClockPrescaler=ADC_CLOCK_SYNC_PCLK_DIV4; //4分频,ADCCLK=PCLK2/4=90/4=22.5MHZ
ADC1_Handler.Init.Resolution=ADC_RESOLUTION_12B; //12位模式
ADC1_Handler.Init.DataAlign=ADC_DATAALIGN_RIGHT; //右对齐
ADC1_Handler.Init.ScanConvMode=DISABLE; //非扫描模式
ADC1_Handler.Init.EOCSelection=DISABLE; //关闭EOC中断
ADC1_Handler.Init.ContinuousConvMode=DISABLE; //关闭连续转换
ADC1_Handler.Init.NbrOfConversion=1; //1个转换在规则序列中 也就是只转换规则序列1
ADC1_Handler.Init.DiscontinuousConvMode=DISABLE; //禁止不连续采样模式
ADC1_Handler.Init.NbrOfDiscConversion=0; //不连续采样通道数为0
ADC1_Handler.Init.ExternalTrigConv=ADC_SOFTWARE_START; //软件触发
ADC1_Handler.Init.ExternalTrigConvEdge=ADC_EXTERNALTRIGCONVEDGE_NONE;//使用软件触发
ADC1_Handler.Init.DMAContinuousRequests=DISABLE; //关闭DMA请求
HAL_ADC_Init(&ADC1_Handler); //初始化
}
//ADC底层驱动,引脚配置,时钟使能
//此函数会被HAL_ADC_Init()调用
//hadc:ADC句柄
void HAL_ADC_MspInit(ADC_HandleTypeDef* hadc)
{
GPIO_InitTypeDef GPIO_Initure;
__HAL_RCC_ADC1_CLK_ENABLE(); //使能ADC1时钟
__HAL_RCC_GPIOA_CLK_ENABLE(); //开启GPIOA时钟
GPIO_Initure.Pin=GPIO_PIN_5; //PA5
GPIO_Initure.Mode=GPIO_MODE_ANALOG; //模拟
GPIO_Initure.Pull=GPIO_NOPULL; //不带上下拉
HAL_GPIO_Init(GPIOA,&GPIO_Initure);
}
//获得ADC值
//ch: 通道值 0~16,取值范围为:ADC_CHANNEL_0~ADC_CHANNEL_16
//返回值:转换结果
u16 Get_Adc(u32 ch)
{
ADC_ChannelConfTypeDef ADC1_ChanConf;
ADC1_ChanConf.Channel=ch; //通道
ADC1_ChanConf.Rank=1; //第1个序列,序列1
ADC1_ChanConf.SamplingTime=ADC_SAMPLETIME_480CYCLES; //采样时间
ADC1_ChanConf.Offset=0;
HAL_ADC_ConfigChannel(&ADC1_Handler,&ADC1_ChanConf); //通道配置
HAL_ADC_Start(&ADC1_Handler); //开启ADC
HAL_ADC_PollForConversion(&ADC1_Handler,10); //轮询转换
return (u16)HAL_ADC_GetValue(&ADC1_Handler); //返回最近一次ADC1规则组的转换结果
}
//获取指定通道的转换值,取times次,然后平均
//times:获取次数
//返回值:通道ch的times次转换结果平均值
u16 Get_Adc_Average(u32 ch,u8 times)
{
u32 temp_val=0;
u8 t;
for(t=0;t<times;t++) { temp_val+=Get_Adc(ch); delay_ms(0); } return temp_val/times; }
 第一问:
基于 python
(所有 python 代码均于 Jupyter notebook 运行,可于上交附件中.ipynb 文件中阅览)
第一问:
基于 python
(所有 python 代码均于 Jupyter notebook 运行,可于上交附件中.ipynb 文件中阅览)